Google has declared war on the independent media and has begun blocking emails from NaturalNews from getting to our readers. We recommend GoodGopher.com as a free, uncensored email receiving service, or ProtonMail.com as a free, encrypted email send and receive service.
When we use our muscles, they produce heat as a byproduct. When we use them a lot, we need to actively cool them, which is why we sweat. By sweating, we pump water out of our bodies, and as that water evaporates, it cools us down. Robots, especially dynamic robots like humanoids that place near-constant high torque demands on their motors, generate enough heat that it regularly becomes a major constraint on their performance. One of the reasons that SCHAFT did so well at the DRC Trials, for example, was their fancy liquid-cooled motors that could put out lots of torque over an extended period of time without overheating.
Engineers solve this heat-generating problem in most mechanical systems by using fans, heat sinks, and radiators, which means that you’ve got all of this dedicated cooling infrastructure that takes up space and adds mass. At the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) this week, Japanese researchers presented a novel idea of how to cool humanoid robots in a much more efficient way: Design them to be able to sweat water straight out of their bones.
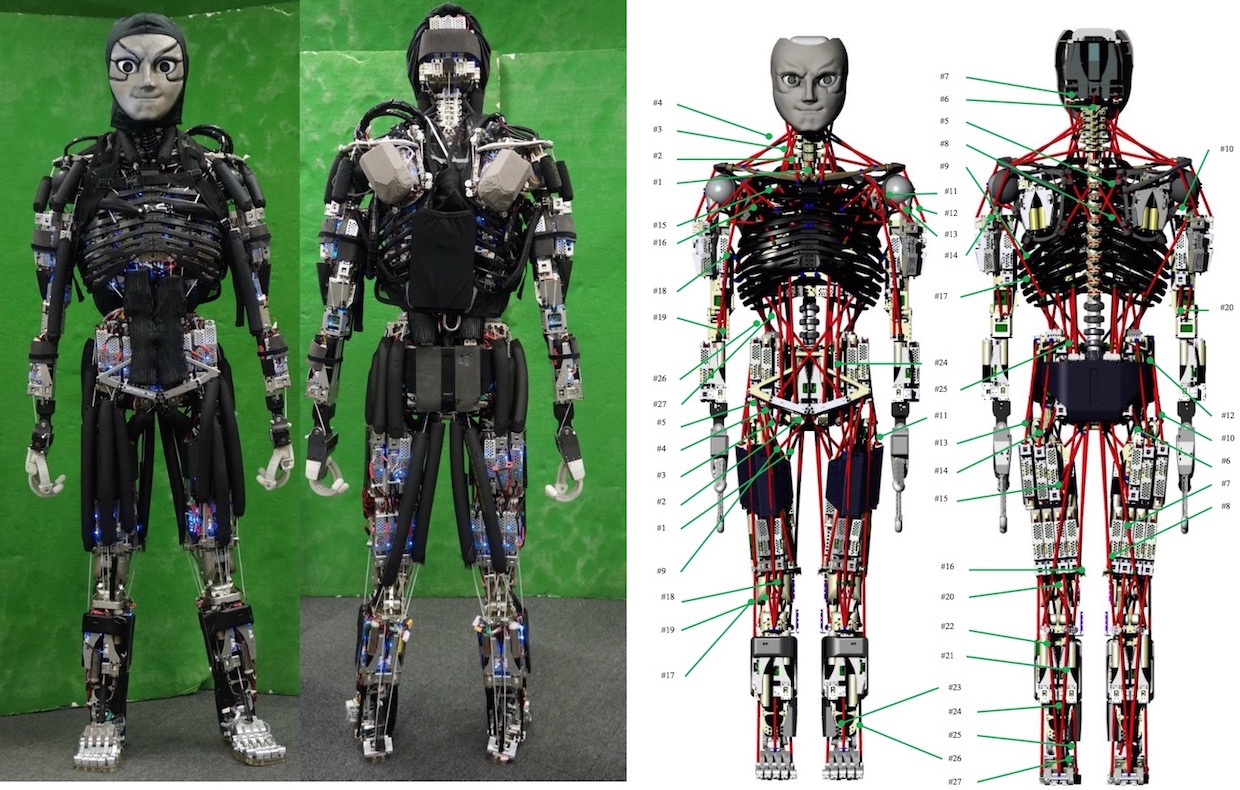
The researchers, from the University of Tokyo’s JSK Lab led by ProfessorMasayuki Inaba, were trying to figure out how to add a cooling system to their 1.7-meter tall, 56-kilogram musculoskeletal humanoid named Kengoro (who joins Kojiro and Kenshiro as part of the JSK robot family). Kengoro is already stuffed to the brim with structural components, circuit boards, gears, and 108 motors (!), and there was simply no room to add active water cooling with tubes and a radiator and fans. The researchers started looking at how they could make better use of Kengoro’s existing components, and they came up with the idea of using the robot’s skeletal structure (its metal frame) as a coolant-delivery system.
Image: JSK Lab/University of Tokyo
Researchers at the University of Tokyo designed Kengoro, a musculoskeletal humanoid with more than 100 motors, to study motions that involve contact with the environment.
The approach goes way beyond just running water channels through the frame and circulating water through them, since that wouldn’t have solved the problem of needing to place a radiator in there somewhere. The researchers instead decided to try a passive technique, allowing the water to seep out through the frame around the motors to cool them evaporatively. In other words, Kengoro sweats.
The trick to this is how Kengoro’s frame is constructed. It’s laser sintered from aluminum powder, which is an additive manufacturing technique that can print complex structures out of metal.
Just like with a 3D printer, you get an enormous amount of control over the printing process, and by altering the energy density of the laser during fabrication, you can selectively vary the permeability of the metal that you’re making. A low permeability piece of metal would be something like a solid brick of aluminum, while a high permeability piece of metal would have a structure full of tiny gaps and tunnels, like a sponge. The laser sintering technique is precise enough to build up aluminum structures with areas of both low and high permeability, letting you make seamless metal components that have microchannels embedded in them through which water can flow.
Now that you’ve got aluminum bones that can transport water around your robot, the other trick (there’s definitely more than one trick here) is to get the robot to sweat in a useful way rather than just leaking water all over the floor. The laser sintering comes in handy here, too, by allowing the water to seep from an inner porous layer into a more porous region near the surface of the frame, from where it can evaporate out into the air.
Kengoro can run for half a day on about a cup of deionized water, although just like you, it has to keep itself hydrated for the cooling to be effective, especially if it’s working hard. Testing shows that this method of cooling works three times better than air cooling, and significantly better than just circulating water through the interior channel, although it’s not as effective as a traditional radiator using active cooling. In practice, this means that Kengoro can run at full power longer, letting it do push-ups for 11 minutes straight without burning out its motors.
“Usually the frame of a robot is only used to support forces,” lead author Toyotaka Kozuki told us. “Our concept was adding more functions to the frame, using it to transfer water, release heat, and at the same time support forces.”
“Skeletal Structure with Artificial Perspiration for Cooling by Latent Heat for Musculoskeletal Humanoid Kengoro,” by Toyotaka Kozuki, Hirose Toshinori, Takuma Shirai, Shinsuke Nakashima, Yuki Asano, Yohei Kakiuchi, Kei Okada, and Masayuki Inabafrom the University of Tokyo was presented this week at IROS 2016 in Daejeon, Korea.